
坐标系
左手坐标系与右手坐标系
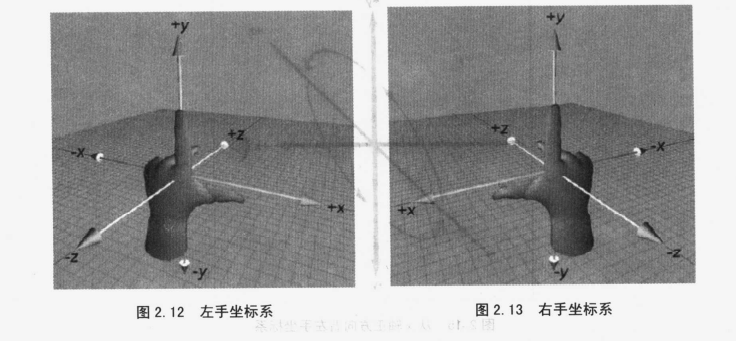
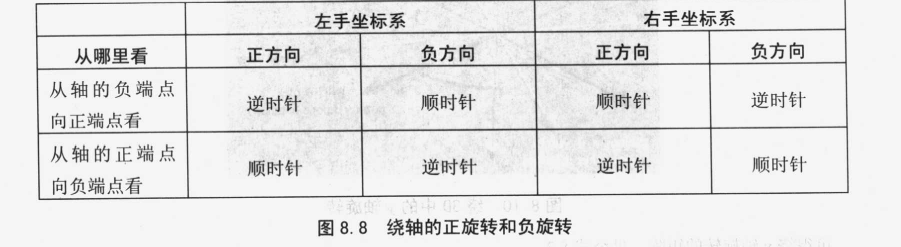
绕轴旋转时,必须知道哪个方向是“正”,哪个方向是“负”:
左手坐标系:
左手法则:伸出左手,大拇指向上,其余四指弯曲。大拇指指向旋转轴的正方向,此时四指弯曲的方向就是旋转的正方向。
右手坐标系:
相反。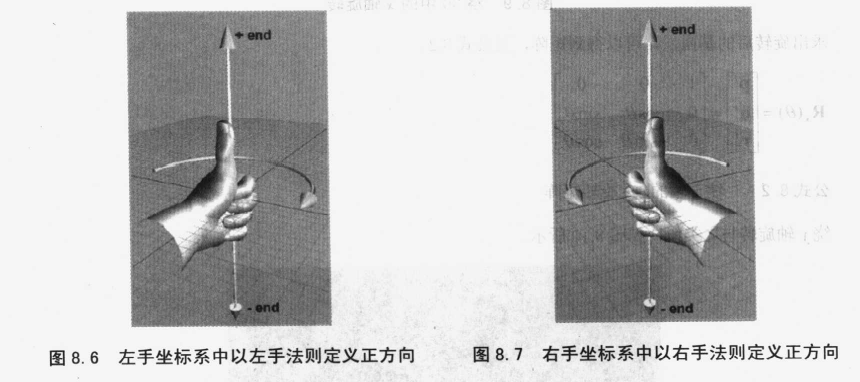
一些重要的坐标系
- 世界坐标系
- 物体坐标系
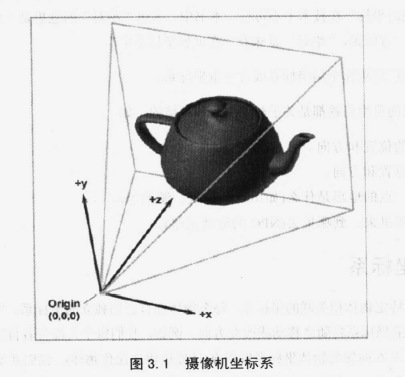
- 摄像机坐标系
惯性坐标系
引入惯性坐标系,是为了简化世界坐标系到物体坐标系的转换,意思是世界坐标系到物体坐标系的“半途”。
惯性坐标系的原点与物体坐标系的原点重合,但轴平行于世界坐标系的轴。
物体坐标系转惯性坐标系只需要旋转,然后惯性坐标系转世界坐标系只需要移动。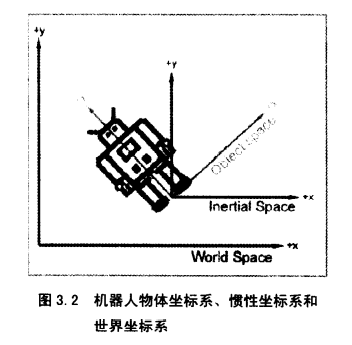
坐标系转换
解决问题:知道某一点的坐标,如何从另一个坐标系去描述这个点?
方法:
- 将轴从物体坐标系转为世界坐标系
- 将物体旋转到惯性坐标系
- 将惯性坐标系平移到世界坐标系
注:站在物体本身的角度来看,旋转和平移的方向相反
3D中的方位与角位移
方向与方位
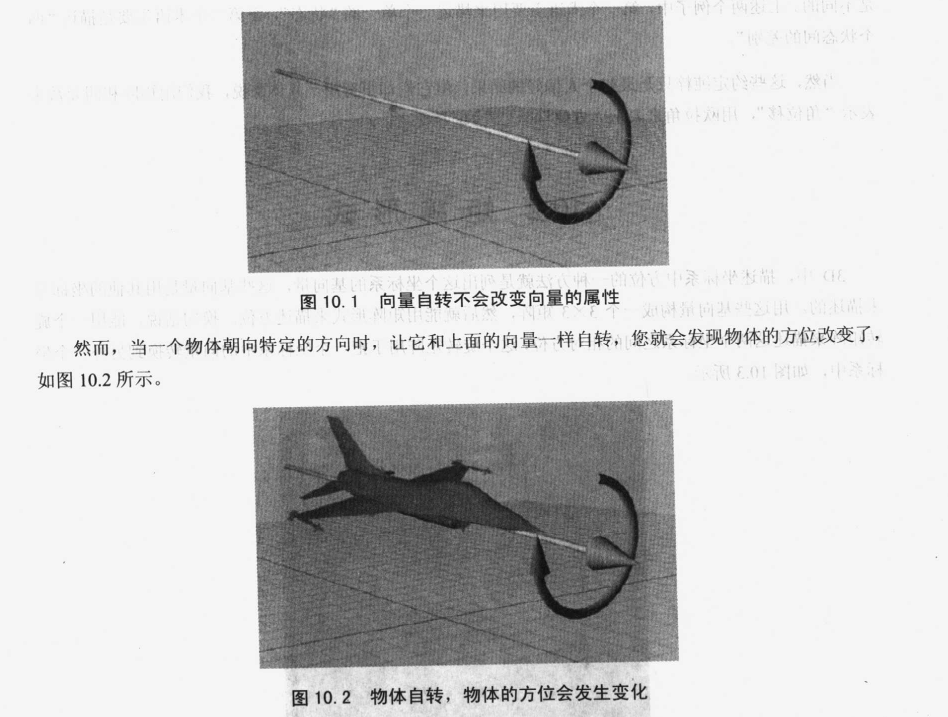
从技术角度来讲,这就说明在3D中,只需要两个数字就能表示一个方向,但是要确定一个方位,却需要三个数字。
描述位置:相对于坐标系原点的偏移。
描述方位:相对于已知方位的旋转来描述的,旋转的量称为角位移。
表示方位:矩阵形式
用一个旋转矩阵来描述两个坐标系之间的相对方位,这个旋转矩阵用于把一个坐标系中的向量转换到另外一个坐标系中。
优点:
- 可以立即进行向量的旋转
- 矩阵的形式被图形API所使用
- 多个角位移连接:可以解决嵌套坐标系
- 矩阵的逆:就是“反”角位移,旋转矩阵是正交的
缺点:
- 占用了更多的内存
- 难以使用
- 矩阵可能是病态的:矩阵的9个数可能只有3个数是必须的,会造成冗余。行必须是单位向量,且它们必须互相垂直。
表示方位:欧拉角形式
欧拉角的基本思想就是将角位移分解为绕3个互相垂直的三个旋转组成的序列。
哪三个轴?按什么顺序?任意三个轴,任意顺序都可以。
但最常用的便是:“hedaing-pitch-bank”约定,它的基本思想是让物体开始于“标准”方位——即物体坐标系与惯性坐标系对齐,随后让物体做旋转,达到我们想要描述的方位。
(左手坐标系)
hedaing:+y向上
pitch:+x向右
bank:+z向前
示例:
- 物体坐标系与惯性坐标系重合
- 绕y轴(hedaing)
- 绕x轴(物体坐标系的x轴)(pitch)
- 绕z轴(物体坐标系的x轴)(bank)
优点:
- 容易使用
- 表达方式简洁
- 任意三个数都是合法的
缺点:
- 给定方位的表达方式不唯一
- 求插值困难
- 万向节死锁
表示方位:四元数
略
几何图元
表示方法
隐式表示:
通过定义一个bool函数f(x,y,z),我们能够隐式表示一个图元。如果所指定的点在这个图元上,函数返回值为True。
参数形式表示:
…
“直接”形式表示:
自由度:每个几何图元都有的固有属性,自由度是无歧义描述该实体所需信息的最小数目。
直线和射线
一、两点表示法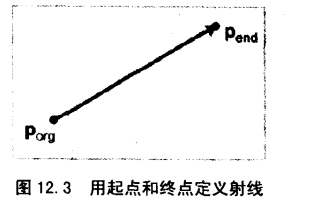
AABB
AABB是一个3D矩形,需要一个最大点和最小点。
可以用下面的类表示AABB:
1 | class AABB{ |
计算AABB:
计算一个顶点集合的AABB是非常简单的,先定义:
1 | Vector3 min = MAXVALUE; |
随后,再遍历全部点,扩展边界:
1 | if(p.x < min.x) min.x = p.x; |
其它以此类推。
变换AABB:
当物体移动/旋转时,AABB也需要随之变换。
通过变换AABB进行计算比通过物体再次计算AABB快得多。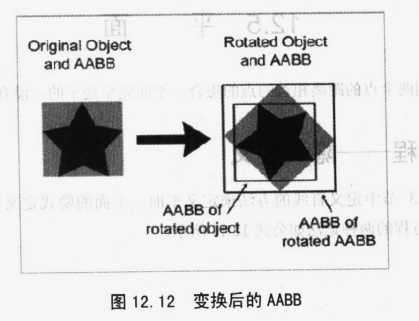
…待补充